I work at the intersection of deep learning, computer vision,
and real-time embedded systems. My focus is making robots perceive the world
robustly — fusing cameras, LiDAR, radar, IMU, and GNSS into reliable state estimates
that downstream planners and controllers can actually trust.
At IDrive Inc. I'm building the perception backbone for an FSD platform:
multi-modal sensor fusion, spatio-temporal motion prediction, and TensorRT-optimized
inference pipelines running on NVIDIA Jetson AGX and DGX Spark.
Outside of work I'm building NervLynx — a contract-first runtime framework
for reliable, observable robotics pipelines (currently under review at IEEE RA-L) — and
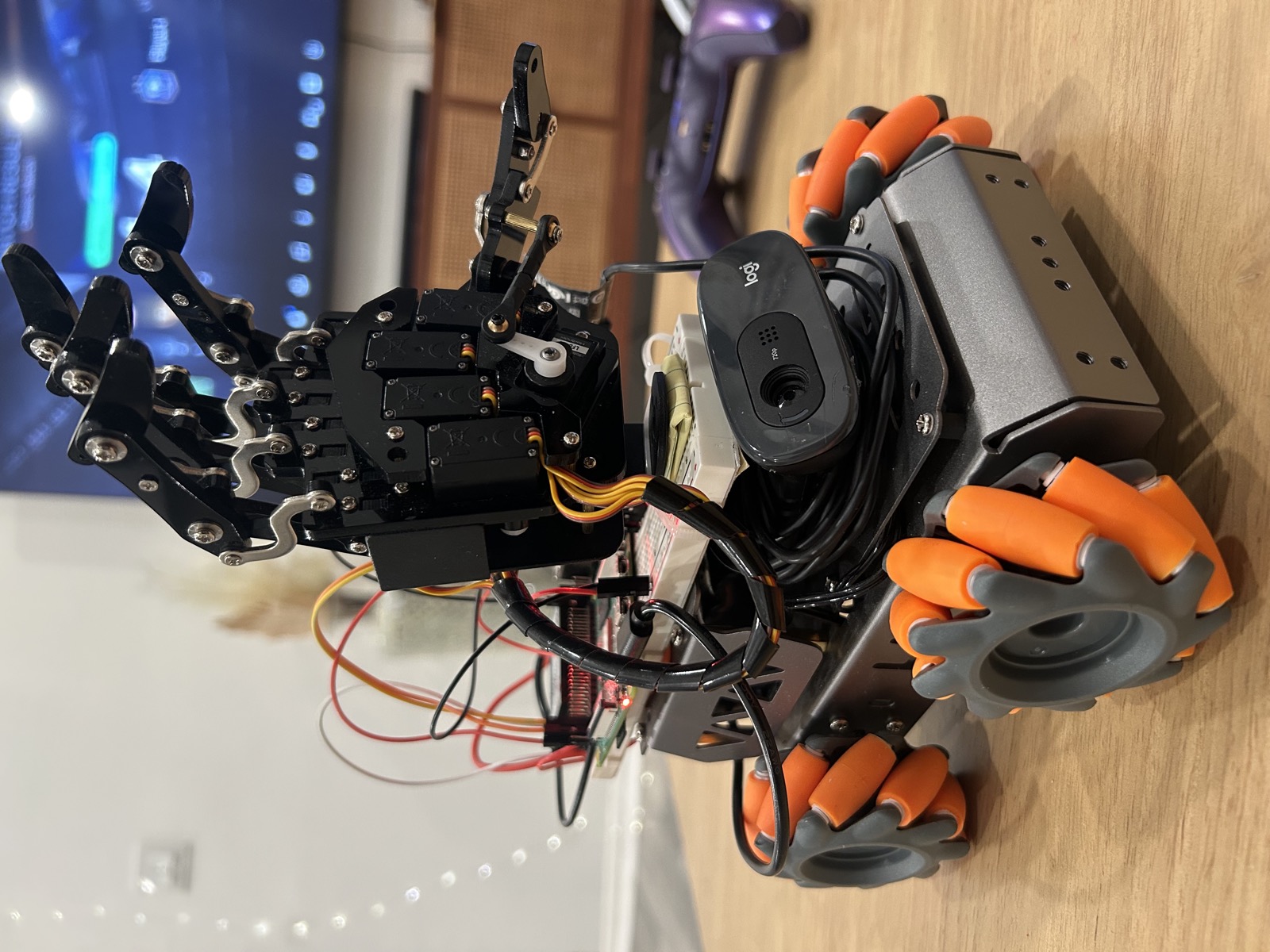
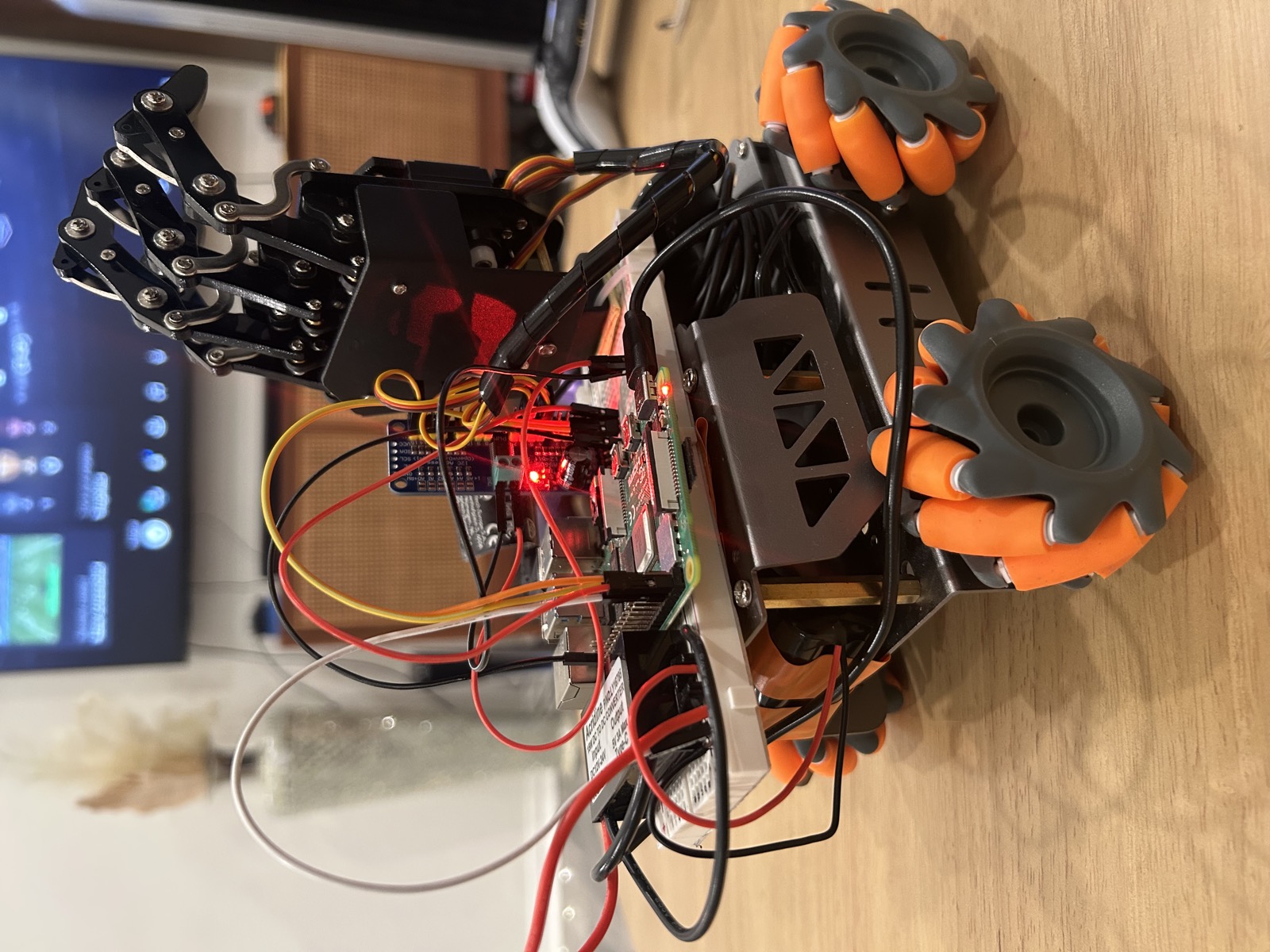
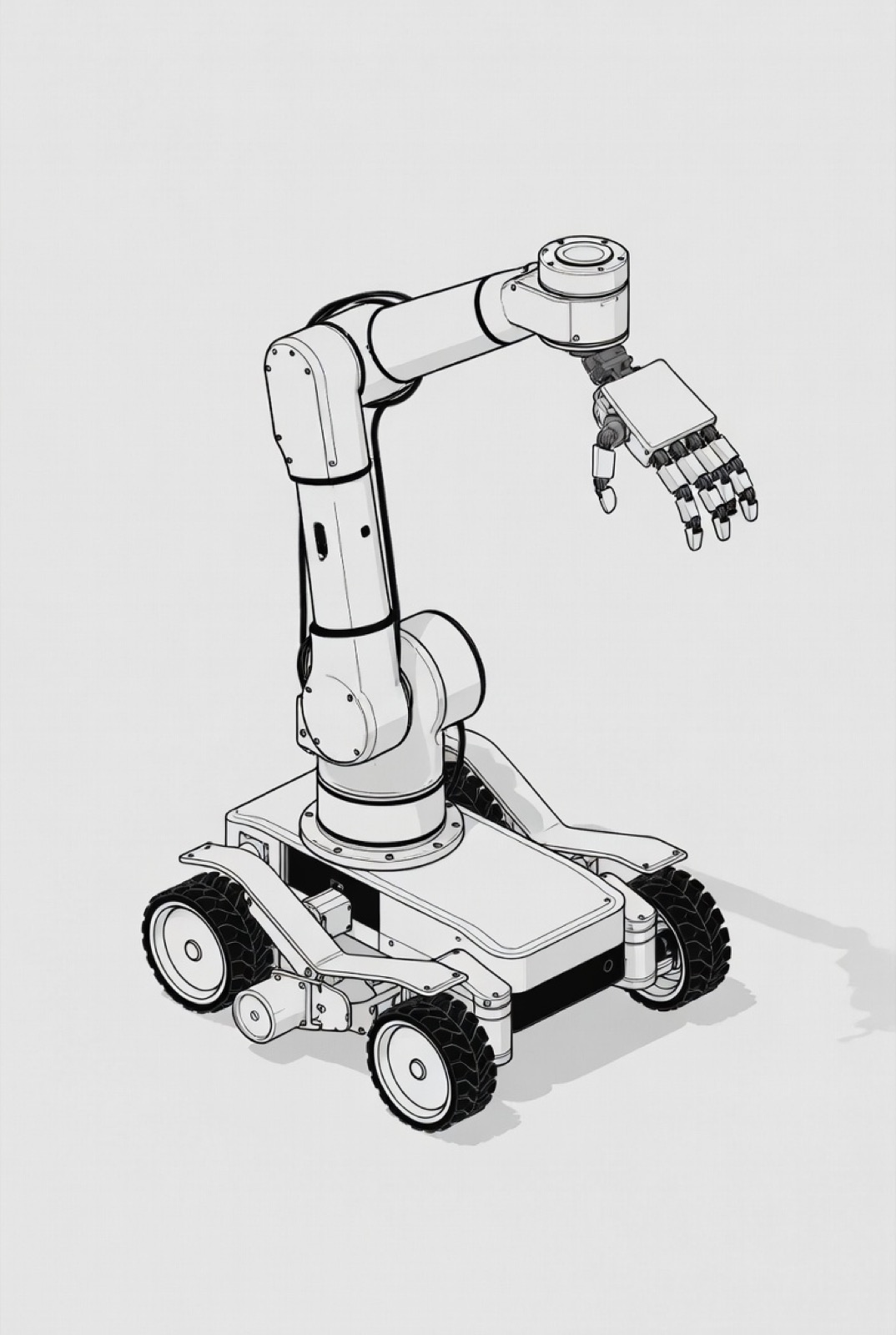
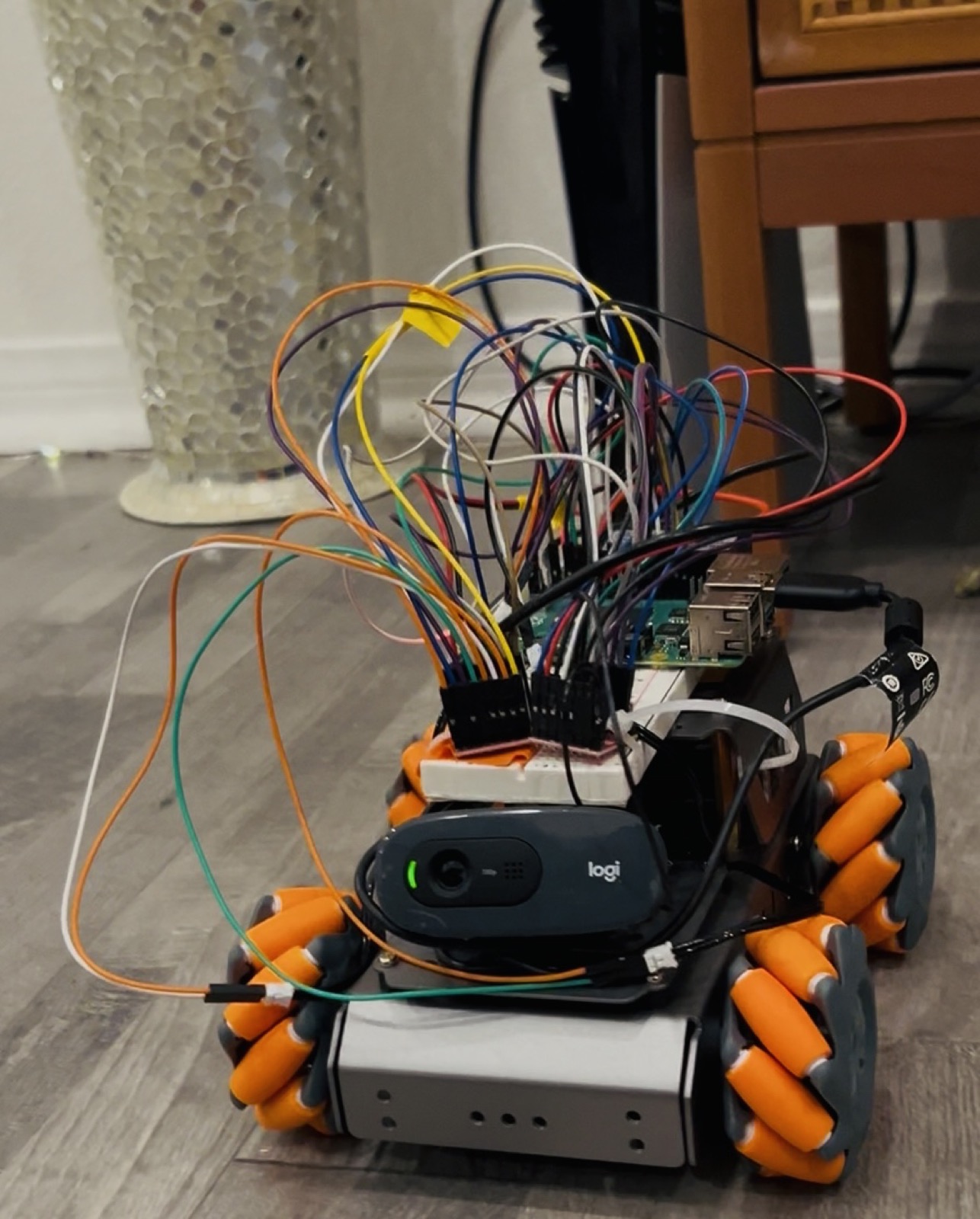
Handme Bot, a teleoperated mobile manipulator with a 5-finger bionic hand.
I hold an MS in Robotics from University at Buffalo, SUNY, where I led
stereo vision and visual odometry research on the KITTI dataset.